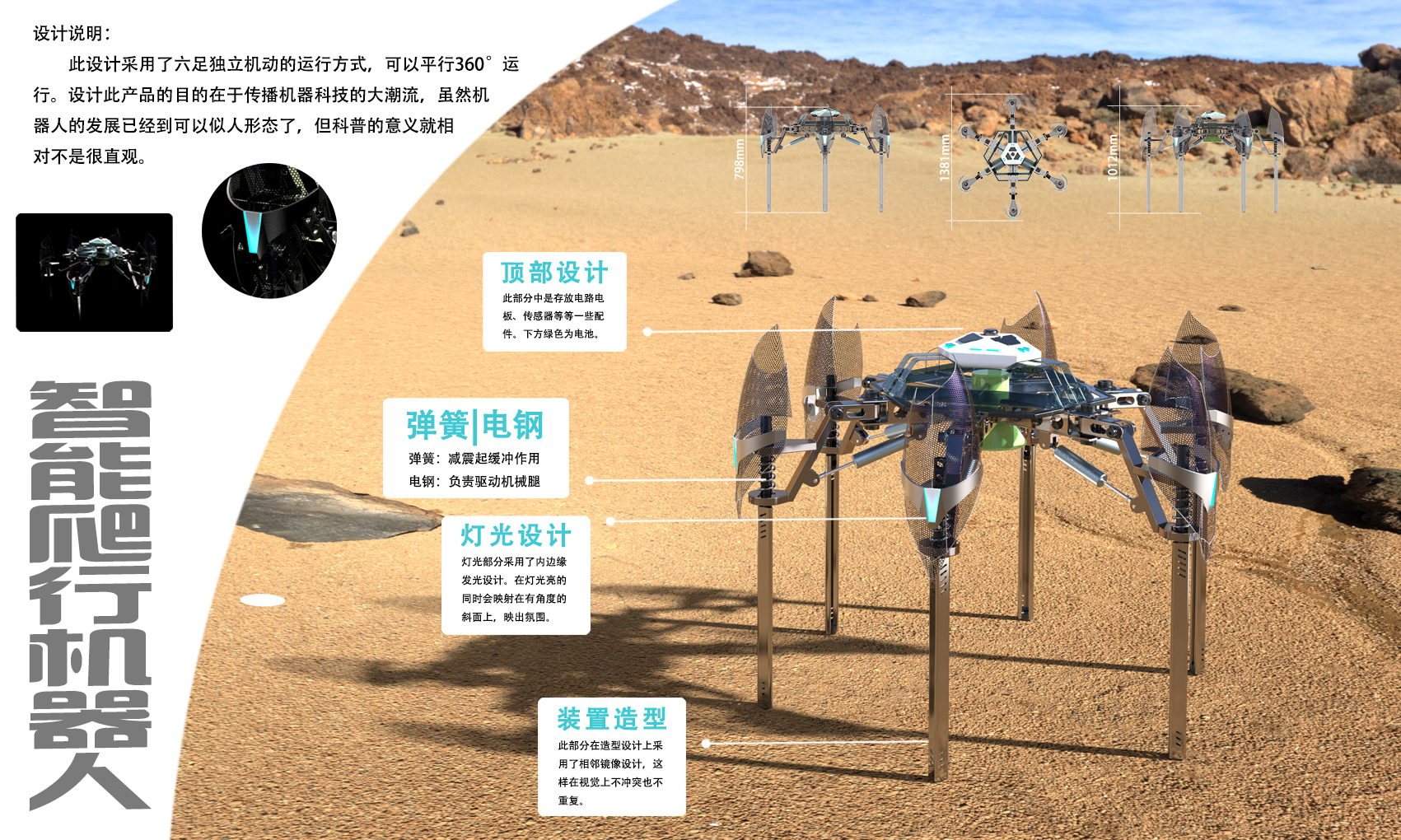
设计说明
此设计的研发主要采用了仿生技术,模仿六足机器人的三角步态进行嫁接。机器人有对复杂地形的条件优势,可以应对多种路面,在后期参与救援与科教都有一定的帮助。
在当今科技发展的大环境下机械的劳动可以说是解放的人们在作业中的危险程度,也改善了人们的生活方式。在全金属构件的情况下,造型装饰设计的意义就由我突出,所以在设计中我用在腿部和顶部的造型设计居多。先对造型的方案的合理性进行草图以及模型相互间的配合关系进行分析。比如减轻配重达到美观,就用了铁网进行包裹。在整体造型做好后进行两两对称镜像,减少视觉疲劳。