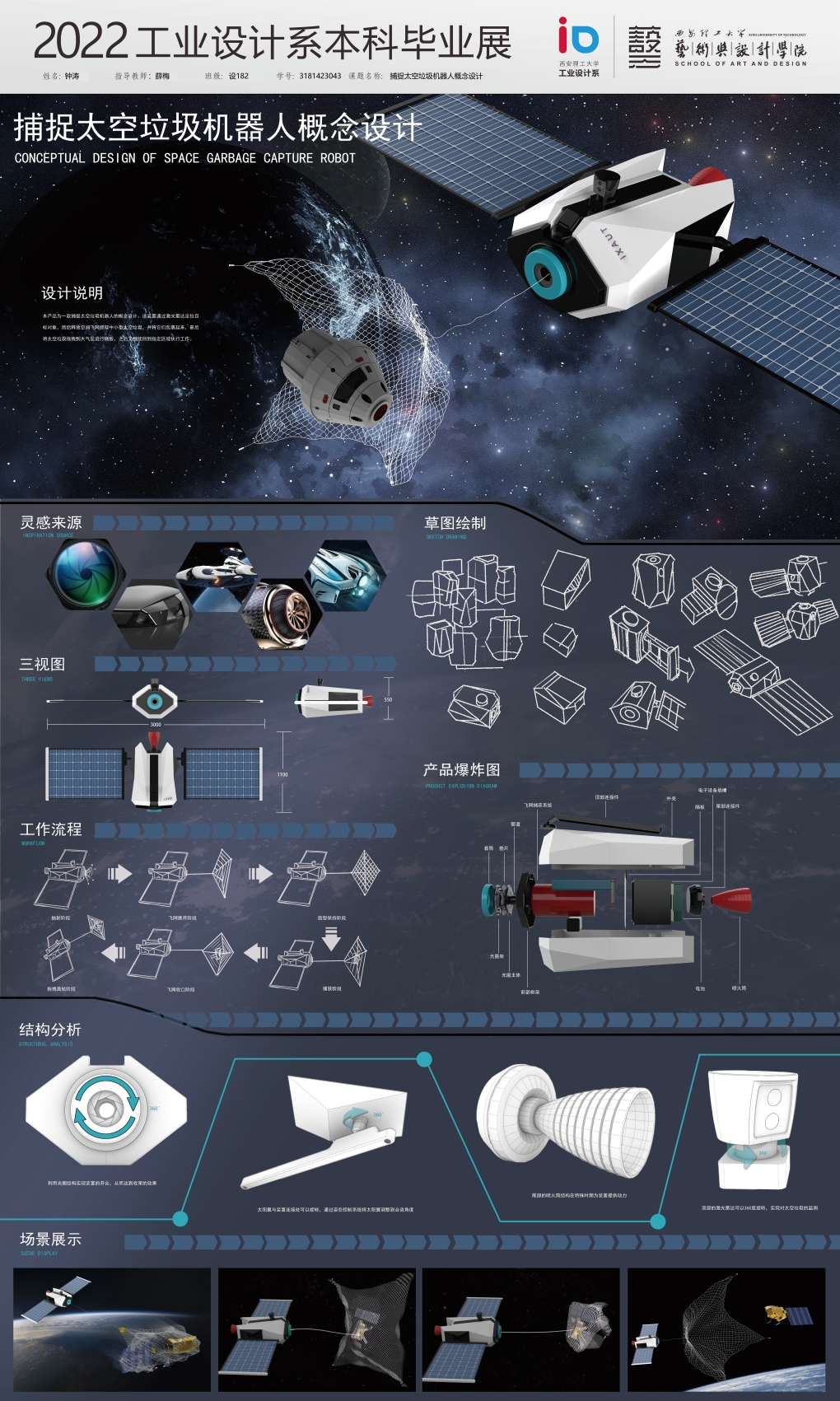
设计说明
本产品为一款捕捉太空垃圾机器人的概念设计。该产品的顶部装有激光雷达,可以360°旋转来探测太空垃圾的具体位置,同时也能将获取到的位置信息传输到地面的指挥控制中心。产品两侧的太阳翼连接杆也能够360°旋转,根据太阳光的位置调整到合适的角度,以获取更多的太阳能。产品尾部有一个喷火筒装置,该装置在特殊情况下,能够利用携带的少许化学燃料为机器人提供动力。该产品的工作原理是,首先通过激光雷达定位目标对象,然后释放空间飞网抓取中小型太空垃圾,并将它们包裹起来,最后将太空垃圾拖拽到大气层进行烧毁,最后又回到指定区域执行工作。